
Hola, buenas tardes,
Estoy teniendo un problema al trabajar con el RTFramework de Rocketbot que publicaron. Mi objetivo es agregar un robot que lea una configuración, similar a lo que se hace en UiPath. Estoy obteniendo una variable de un archivo .ini y almacenándola en una variable, pero cuando intento llamarla desde otro bot, el valor de la variable no se encuentra disponible y me devuelve un mensaje como si no hubiera sido creada. La variable en cuestión es {str_ruta}.
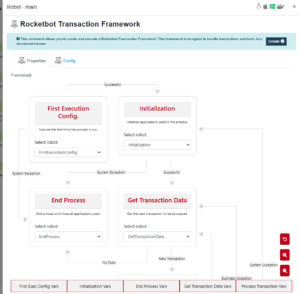
Mi flujo actual es el siguiente:
- Main
- FirstExecutionConfig
- Inicialización (Aquí es donde he creado el bot de configuración, donde obtengo el valor desde el
.ini) - GetTransactionData
- ProcessTransaction
- EndProcess
El problema es que las variables que estoy declarando en el Main tampoco puedo compartirlas con los otros robots que están enlazados al RTFramework. No logro encontrar un mecanismo claro para pasar variables de un bot a otro, como en los modelos de “padre”, “hijo” o “nieto”. ¿Existe alguna configuración adicional para lograr esto?
Además, quiero agregar la capacidad de gestionar correos electrónicos dentro del config, como el subject, body, y las direcciones de emails. Mi idea es crear un robot independiente, al que llamaré Mail, que pueda enviar correos electrónicos desde distintas partes del flujo. Quisiera poder enviar un correo en momentos específicos, como por ejemplo, al finalizar el EndProcess o el ProcessTransaction, o incluso cuando se capture un error en un catch de alguna tarea enlazada.
¿Alguien sabe cómo podría estructurar esto para que el robot Mail envíe correos de manera eficiente desde diferentes puntos del framework?
He intentado usar ReturnData para pasar las variables entre bots, pero no consigo que la variable sea reconocida en los procesos posteriores.
Cualquier orientación o sugerencia será muy apreciada. ¡Gracias de antemano!

Hola, buenas tardes, cada robot que se utilice en el framework funciona como los robots expose. Es decir, para que te aparezcan las variables en la configuración del comando debes entrar al robot y exponerlas. Te comparto la documentación que tenemos sobre el framework:https://docs.rocketbot.com/2024/07/17/rocketbot-transaction-framework/
Verifique que tenga las variables bien configuradas y expuestas como lo indica la documentación. Quedamos atentos!
Muchas gracias, pude realizar correctamente el paso de variables desde el Main hacia el resto de las tareas en Expose.
Sin embargo, me encuentro con un inconveniente: al intentar pasar una variable desde la tarea Initialization hacia la tarea Process, la variable no se transfiere correctamente. Ya declaré la variable en la tarea Process, pero aún así no logra recibir el valor que debería venir desde Initialization.
Muchas gracias, pude realizar correctamente el paso de variables desde el Main hacia el resto de las tareas en Expose.
Sin embargo, me encuentro con un inconveniente: al intentar pasar una variable desde la tarea Initialization hacia la tarea Process, la variable no se transfiere correctamente. Ya declaré la variable en la tarea Process, pero aún así no logra recibir el valor que debería venir desde Initialization.
Es la primera vez que escucho sobre eso de RT Framework. Ahora, en el caso de las variables. Lo lógica es la siguiente:
Podes acceder a las variables de un bot padre desde cualquier hijo.
Es decir, las variables del bot principal pueden ser accedidas por cualquier hijo.
La forma? variable_local = GetVar(“rocketbot_var”) en un script python.
Con el commando set, únicamente indicar los corchetes y el nombre:
{rocketbot_var} y en el input de abajo, la variable local: {variable_local}
Si se trata de un string te recomiendo meter la variable dentro de “”, oséa:
“{rocketbot_var}”
Muchas gracias, pude realizar correctamente el paso de variables desde el Main hacia el resto de las tareas en Expose.
Sin embargo, me encuentro con un inconveniente: al intentar pasar una variable desde la tarea Initialization hacia la tarea Process, la variable no se transfiere correctamente. Ya declaré la variable en la tarea Process, pero aún así no logra recibir el valor que debería venir desde Initialization.